










Key Hardware in Robotic Motion Control: Actuators/Robotic Joint Module
Actuators are very critical components in the hardware system of robots, mainly responsible for converting energy into the mechanical motion of the robot.
Actuators can be classified in different ways:
By motion type:divided into rotary actuators and linear actuators. Rotary actuators are used to enable the joints of the robot to perform rotary motion, while linear actuators are used for push-pull actions, such as the extension of an arm.
Laifual is one of the top manufacturers of harmonic drives and rotary actuators in China. We have achieved complete our own in-house research and production processes.
By power source: divided into hydraulic, pneumatic, or electric actuators. In humanoid robots, electric actuators are commonly used due to their high precision, low noise, and ease of networked feedback.
Laifual’s rotary actuators can be equipped in robots and powered by electric actuators.
By drive mode: divided into traditional stiffness actuators (TSA), series elastic actuators (SEA), and proprioceptive actuators (PA). Traditional stiffness actuators are mainly composed of motors, reducers, encoders, and torque sensors. Series elastic actuators simulate muscle systems, providing compliance and high energy efficiency. Proprioceptive actuators do not rely on additional force or torque sensors and can directly sense the interaction force between the robot and the external environment.
Currently, traditional stiffness actuators are the mainstream solution, while proprioceptive actuators have been a research hotspot in recent years. Laifual’s rotary actuators use the traditional stiffness actuator (TSA) drive mode.

Key Technical Parameters
The technical parameters of humanoid robots reflect their capabilities and maximum operational performance. The main parameters include degrees of freedom, rated load, workspace, and working accuracy. Here are detailed explanations of some main technical parameters:
- Degrees of Freedom (DOF): Refers to the number of independent motion directions that the robot can control, designed according to its purpose. Humanoid robots typically mimic human movements; the more degrees of freedom, the closer the robot can get to human hand functions, the better its versatility, and the more complex its structure, increasing overall robot requirements.
- Rated Load: Also known as effective load, it refers to the maximum weight the robot can continuously bear under normal operating conditions. This usually affects the robot's handling and operational capabilities. When the load is large, increasing the motor power is not cost-effective. Instead, the output torque can be increased within an appropriate speed range through a reducer.
- Workspace: Also known as work range or work stroke, it describes the area where the robot can reach all positions. The size and shape of the workspace depend on the robot's design and the degrees of freedom of the joints, reflecting the robot's working capacity. It is related not only to the size of the robot's links but also to the overall structure of the robot.
- Working Accuracy: Refers to the position accuracy and repeatability that the robot can achieve when performing tasks. Repeat positioning accuracy depends on the precision of the robot's joint reducer and transmission device, while absolute accuracy depends on the comprehensive performance of the robot's control algorithm, encoder accuracy, and reducer and transmission device accuracy. High-precision robots are suitable for tasks requiring fine operations.
Other parameters include working speed, control mode, actuation method, mounting method, power source capacity, robot mass, and environmental parameters, which determine the conditions under which the robot can work. These technical parameters collectively define the performance characteristics of humanoid robots, determining their applicability and efficiency in specific application scenarios. When designing and selecting humanoid robots, these parameters need to be considered based on task requirements and working environments to ensure that the robot can meet the expected work requirements.
Case Study: Tesla Optimus Actuator Technical Framework
On October 1, 2022, Tesla released Optimus at AI Day; on December 14, 2023, Tesla released Optimus-Gen2.
Dexterous Hand Degrees of Freedom: The Optimus dexterous hand has 6 active degrees of freedom and 5 passive degrees of freedom; Optimus-Gen2 increases to 11 active degrees of freedom and adds touch sensors at each fingertip.
The actuator solutions for Tesla Optimus Gen2 come from: BenMo Research, Robot Heart, Tesla official website, Great Wall Securities Industrial Financial Research Institute. Note: The units of numbers are in pieces.
Linear Actuator
The configuration of the Tesla Optimus linear actuator is: frameless torque motor1 + planetary roller screw1 + force sensor1 + encoder1 + driver + ball bearing1 + four-point contact ball bearing1.

Screw: Uses a reverse planetary roller screw with strong rigidity.
Encoder: Uses a position sensor.
Force Sensor: Configured with a force sensor due to the non-backdrivability of the screw.
Bearing: Uses deep groove ball bearings and four-point contact ball bearings.
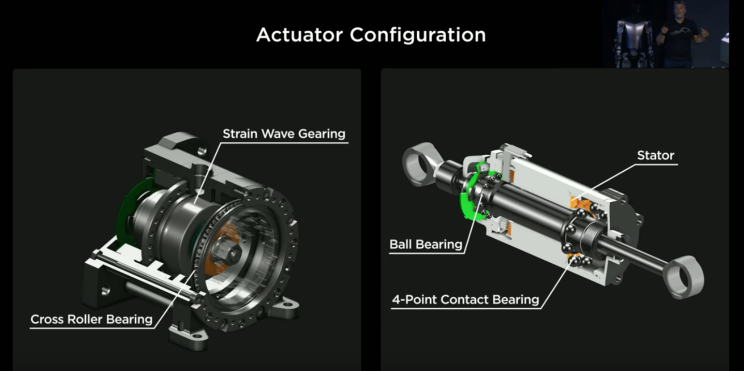
Tesla Optimus linear actuator structure, source: Tesla
Rotary Actuator
The configuration of the Tesla Optimus rotary actuator is: frameless torque motor1 + harmonic reducer1 + torque sensor1 + encoder2 + driver1 + cross roller bearing1 + angular contact ball bearing*1.

Reducer: Uses a harmonic reducer, which has a simple structure, high reduction ratio, high transmission accuracy, and high transmission efficiency.
Position Sensors: Uses two encoders, including an input position encoder and an output position encoder.
Torque Sensor: Uses a non-contact torque sensor.
Bearings: Uses angular contact bearings and cross roller bearings.
Tesla Optimus rotary actuator structure, source: Tesla
Laifual Achieves Independent Research and Production of Core Robot Components
Core components of actuators include motors, reducers, screws, encoders, and torque sensors.
Motor: The "blood vessel" of the actuator system. It drives mechanical components to achieve specific movements based on torque, speed, and position command signals received. Additionally, various sensors in the motor, such as encoders and force sensors, provide real-time operational information of the motor and mechanical components back to the driver and controller, enabling precise motion control. The actuator's drive source can be a DC motor, AC motor, stepper motor, or servo motor, depending on the required torque, speed, accuracy, and control requirements. Humanoid robots mainly use frameless torque motors with high integration, precision motion control, and efficient torque output.




Copyright © 2024 Zhejiang Laifual Drive Co., Ltd. All rights reserved. Designed by 